
联系方式
销售热线:0755-27058848
0755-27058348
13510090193(同微信)
E-mail:mail@chinarongde.com
地 址:深圳宝安燕罗街道下围水工业区1栋

当前位置:首页 >新闻资讯 > 行业新闻
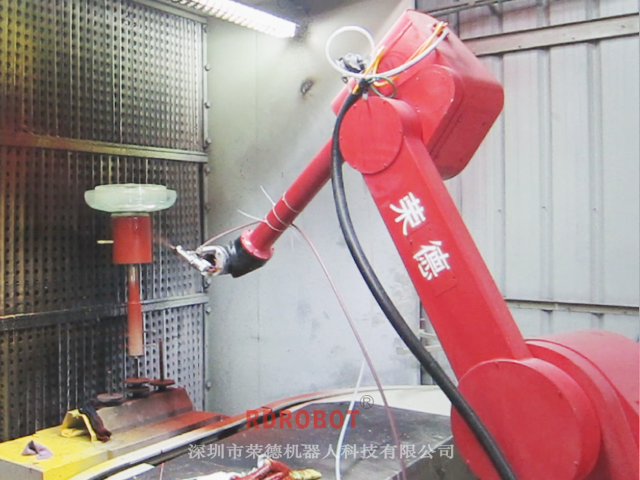
自动喷涂机器人系统的安全防护措施
发布时间:2016-05-09 14:21:16 发布人:荣德机器人
- 喷涂机器人的运行特性与其他设备不同。机器人以高能运动掠过比其机座大的空间,其手臂的运动形式和启动很难预料,且可能随生产和环境条件而改变。应在原始设计中消除喷涂机器人运动部件产生的危险,若不能消除,则应进行综合安全防护设计。必要时,应考虑安全预防措施。
1.安全防护措施的设计和选择,应考虑喷涂机器人的类型、应用及其他相关设备的关系,应设计和选择必须适合工件喷涂作业,并且使得示教编程、设定、维护、程序验证及故障查找要求设备布置紧凑时,也能安全操作。
2.在设计或选择合适的安全防护措施之前,必须识别各类风险和评价有关风险,预防偶然事故的技术措施,遵循下列两条基本原则:自动操作期间安全防护空间无人。设立安全防护空间和限定空间;当安全防护空间内有人进行示教、程序验证的工作时,应消除危险或至少降低危险。
3.喷涂机器人系统在设计、制造及应用中应考虑到万一某一元器件发生不可预见的失效时,安全功能应不受影响,机器人系统仍然应保持在安全状态,比如限定运动范围、紧急停机和安全停机等。
4.每个机器人系统都应有与其供电电源隔离的装置,该装置要设在无人身伤害危险之处,并具有断路或开路的功能。
5.紧急停机。手动操作急停器件应符合规定要求。每台喷涂机器人都应有与外部急停装置,安全防护装置相连接的措施或与急停电路连锁。
6.喷漆机器人系统的电气设备装置及其布线等应符合该喷涂设备所处的爆炸性环境的要求。对于由人工引导手臂进行编程的机器人,在需要编程或补偿时,应采取切断电源的安全预防措施。
好品质-选荣德,21年研发自动喷涂设备经验,国家高新技术企业,七百平米实验室提供免费试机打样!免费试喷打样热线:138 2368 0921 白小姐 喷涂视频:http://www.chinarongde.com/
- 上一篇:自动往复喷漆生产线设备的简单介绍
- 下一篇:自动喷漆室送风空调装置的介绍
深圳市荣德机器人科技有限公司
深圳市宝安区燕罗街道下围水工业区第1栋
销售热线:0755-27058848/27058348
13510090193(同微信)
服务热线:0755-27058848
采购热线:0755- 27058348
采购热线:0755- 27058348
E - mail:mail@chinarongde.com
在线Q Q:516886857